Sistemas Supervisórios, Sensores, Atuadores e Robótica
*Tópicos
SISTEMAS SUPERVISÓRIOS
•HMI (Human Machine Interface)
•SCADA (Supervisory Control and Data Aquisition)
•Modos Operacionais
•Atividades dos Operadores
•Características dos Sistemas Supervisórios
SENSORES
•Definição
•Tipos de sensores
•Especificação
•Conversores ( A/D, D/A)
ATUADORES
•Definição
•Motores
•Outros tipos
ROBÓTICA
•Definição
•Autonomia
•Sistemas de controle
•Sensores em robótica
•Aplicação de robôs industriais
•Programação de robôs
*Sistemas Supervisórios
O que são?



















 *Atuadores
*Atuadores
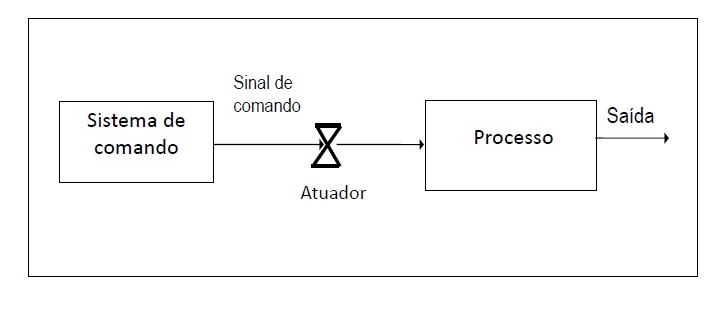
•Os atuadores são usados em automação para entregar ao sistema a excitação necessária para seu funcionamento, na forma do tipo de energia adequado.
•Se o funcionamento do sistema estiver baseado em algum movimento de uma de suas partes, serão necessários atuadores para fornecer energia mecânica para o movimento.
•Se o sistema for térmico, será necessário um atuador que forneça energia térmica para atingir uma dada temperatura desejada.
•Amplificadores de energia
•Transformadores de energia elétrica (sinal de controle) em outras formas de energia.






SISTEMAS SUPERVISÓRIOS
•HMI (Human Machine Interface)
•SCADA (Supervisory Control and Data Aquisition)
•Modos Operacionais
•Atividades dos Operadores
•Características dos Sistemas Supervisórios
SENSORES
•Definição
•Tipos de sensores
•Especificação
•Conversores ( A/D, D/A)
ATUADORES
•Definição
•Motores
•Outros tipos
ROBÓTICA
•Definição
•Autonomia
•Sistemas de controle
•Sensores em robótica
•Aplicação de robôs industriais
•Programação de robôs
*Sistemas Supervisórios
O que são?
São Sistemas Digitais para monitoração e operação da planta que gerenciam variáveis de processo.

*Interface Homem Máquina
IHM -Interface Homem Máquina (HMI –HumanMachineInterface
É um hardware industrial composto normalmente por uma tela de cristal líquido e um conjunto de teclas para navegação ou inserção de dados e utiliza um software proprietário para sua programação.

•Normalmente utilizados em automação no chão-de-fábrica;
•Construção extremamente robusta;
•Servem na operação e simples máquinas até cabines de aeronaves.
Vantagens
•Economia de fiação e acessórios;
•Facilidade de montagem;
•Aumento da capacidade de controle;
•Maior flexibilidade frente a alterações no campo;
•Operação amigável;
•Fácil programação e manutenção.
Máquinas automatizadas com uso de CNC
É imprescindível o uso de IHM dedicadas
•Referenciamento de eixos;
•Ajuste de ferramentas;
•Carga do programa de peças;
•Acompanhamento da execução de programas;
•Ajuste de velocidade de avanços de ferramentas;
•Visualização de alarmes.
*SDCD –Sistema Digital de Controle Distribuído

-O SDCD ou Sistema Digital de Controle Distribuído é a evolução do controlador de painel. A idéia é de usar computadores dedicados com entradas e saídas, tanto discretas quanto analógicas, além de redes de campo e redes de controle para gerenciar e controlar processos industriais.
-A filosofia do sistema de controle digital distribuído é a de dividir os equipamentos em vários módulos funcionalmente distintos: processo, controle, operação, gerenciamento e comunicação.
-O SDCD se compõe de três elementos básicos: a interface com o processo (integrando os controladores e unidades de aquisição de dados), a Interface-Homem-Máquina (IHM) e a via de dados (data highway) que interliga as primeiras.
*Protocolos de Comunicação Industriais
•Com a tendência atual de utilização de sistemas de informatização baseados em dispositivos de baixo custo, como microcomputadores, torna-se necessária a interligação desses dispositivos por meio de rede digital.
•Multiprotocolos: na maioria das aplicações, a solução é baseada em uma decisão que implica na convivência entre protocolos diferentes para atender a integração de protocolos de fabricantes diferentes ou interligar os diferentes níveis de um sistema industrial.
PROcess FIeldBUS Process Automation
É um protocolo de comunicação especialmente projetado para atender as necessidades da Automação de Processos e otimizado para equipamentos de campo
o Transmissores, Válvulas, Atuadores, Conversores, etc
o Interligados e Energizados via o barramento
o cada equipamento de campo possui um endereço físico e único no barramento
o também aplicável em áreas classificadas (intrinsecamente seguro)
*SCADA
SCADA –Supervisory Controland Data Aquisition

Criado para supervisão e controle de quantidades elevadas de variáveis de entradas e saídas digitais e analógicas distribuídas.


Comunicação por consulta (polling)
•Comunicação (Mestre/Escravo): a estação central (Master) tem controle absoluto das comunicações;
•Leitura sequencial de dados de cada estação (Slave);
Desvantagens
•Incapacidade das estações de comunicarem situações imediatas;
•O aumento de estações tem impacto negativo;
•A comunicação entre estações remotas tem que passar pela central.
Vantagens
•Simplicidade no processo de aquisição de dados;
•Inexistência de colisões no tráfico da rede;
•Facilidade na detecção de falhas de ligação;
•Permite o uso de estações remotas não-inteligentes.
*Arquitetura de supervisão



*Supervisão pela Internet
Clientes Web via Internet
Servidor Web sendo utilizado para permitir supervisão de plantas via intranet ou Internet

*Modos Operacionais
O sistema supervisório é caracterizado por duas fases:
•Modo de desenvolvimento: criação das telas com o desenho animado, programa e banco de dados;
•Modo de execução (Runtime): mostra o sistema em operação
*Atividades dos Operadores
•Operação normal: essencialmente de vigilância;
•Operação de contingência: quando o operador deve optar pela operação manual ou automática;
•Veracidade dos valores apresentados na tela.
o Confrontação entre vários indicadores;
o Análise de valores com base na experiência;
o Comparação com o que se passa externamente.
*Características dos Sistemas Supervisórios
•Facilidade de interpretação: a representação da planta por áreas especialmente com animação de tela;
•Flexibilidade: alteração de telas sem interrupção da operação normal;
•Estrutura: nas telas deve ser mostrados os principais equipamentos relacionados com sua posição no setor operacional.
*Sensores
Interface do processo com o computador

São dispositivos que converte uma variável física de uma forma mais útil para a aplicação de controle. Também chamados de transdutores.
Sensores de pressão

Sensores para medição de nível

Sensores de temperatura

Sensores de pressão

Chaves de temperaturas
Bimetálicos e bulbo capilar para contatos de chaveamentos
Fornecem um contato quando uma determinada temperatura é ultrapassada
Sensores de proximidade
Opera eletronicamente sem contato físico, por aproximação
Insensível a vibrações
Ponto de acionamento constante
Indutivos
Capacitivos
Fotoelétricos ou óticos
Sensor ótico de reflexão difusa
Ótico de barreira
Ótico retro-reflexão
Fibra ótica
Magnéticos (magnéticos-pneumáticos)
Ultra sônicos
Pneumáticos
Sensores indutivos
Princípio: Variação de campo magnético
Material de condução elétrica
CA ou CC

•Os atuadores são usados em automação para entregar ao sistema a excitação necessária para seu funcionamento, na forma do tipo de energia adequado.
•Se o funcionamento do sistema estiver baseado em algum movimento de uma de suas partes, serão necessários atuadores para fornecer energia mecânica para o movimento.
•Se o sistema for térmico, será necessário um atuador que forneça energia térmica para atingir uma dada temperatura desejada.
•Amplificadores de energia
•Transformadores de energia elétrica (sinal de controle) em outras formas de energia.
•São dispositivos que transforma um sinal físico em outro, normalmente com amplificação para atuação no sistema;
•Os atuadores podem sem classificados em três categorias:
Elétricos;
Hidráulicos;
Pneumáticos.
*Atuadores Elétricos
Utilizam energia elétrica.
São os atuadores mais comuns e utilizados em robótica móvel.
Apresentam ótimas características de controle, precisão e confiabilidade.
Os motores para uso em robótica são agrupados em 3 categorias:
Motores de corrente alternada (AC).
Motores de corrente contínua (DC).
Motores de passo.
VANTAGENS
•Eficiência calculada, controle preciso;
•Envolve uma estrutura simples e fácil manutenção;
•Não requer uma fonte de energia cara.
•Custo relativamente pequeno;
•Melhor precisão e repetibilidade;
•Não requerem grandes espaços úteis;
•Utilizam servomotores de corrente contínua, de corrente alternada ou motores de passo;
*Atuadores Hidráulicos
Os atuadores hidráulicos se caracterizam por terem como fonte de energia um líquido que sedesloca por um conduto com uma pressão adequada (utiliza como fonte de energia a pressão de um líquido).
Este líquido é geralmente “óleo” ou “água”.
A menor compressibilidade em relação ao ar o torna mais adequado aos movimentos lentos e de maior precisão.
VANTAGENS
•Momento alto e constante sob uma grande faixa de variação de velocidade;
•Precisão de operação (menor que o elétrico e maior que o pneumático);
•O óleo não é compressível e não há variação de seu volume quando se varia a pressão;
•Pode manter um alto momento para um longo período de tempo, quando parado;
•Geralmente associado a robôs de maior porte;
•Possuem maior força (torque) e velocidade;
•Grande precisão.
*Atuadores Pneumáticos
O atuador pneumático tem como fonte de energia um gás pressurizado, geralmente ar comprimido (utiliza como fonte de energia a pressão do gás).
VANTAGENS
•Podem operar em velocidades extremamente altas;
•Custo relativamente pequeno;
•Fácil manutenção;
•Podem manter um momento constante em uma grande faixa de velocidade;
•Pode manter alto o momento por longos períodos de tempo sem danos, quando parado;
•Geralmente associado a robôs de pequeno porte com 2 a 4 juntas;
•Menor precisão devido à compressibilidade do ar;
•Em geral não requerem instalações especiais;
•Não requerem grandes espaços úteis;
*Conversores de Sinal
•Valores analógicos não podem ser diretamente processados por sistemas digitais.
•Precisam ser convertidos para uma cadeia de bits.
•Esta conversão é conhecida como Conversão Analógica-Digital.
Transdutores são equipamentos que convertem grandezas físicas em sinais elétricos (correntes ou tensões proporcionais) e vice-versa.
Exemplo: Tacômetros, Termistores, Células de carga,etc.

Analógico x Digital

Analógico AD
Analógico DA

Por que usar Sistemas Digitais?
Facilmente programáveis
Maior precisão e exatidão (Imunidade a ruídos)
Maior reprodutibilidade
Facilitam o armazenamento (apenas dois valores, 0 ou 1)
São compactos
*Robótica Industrial

































Facilmente programáveis
Maior precisão e exatidão (Imunidade a ruídos)
Maior reprodutibilidade
Facilitam o armazenamento (apenas dois valores, 0 ou 1)
São compactos
*Robótica Industrial











Aplicações de Robôs Manipuladores
•Robôs manipuladores industriais geralmente trabalham integrados em Células de Trabalho, associados a outras máquinas:
–Máquinas de comando numérico.
–Veículos de Condução Automática. AGV (Automatic Guided Vehicle)
–Sistemas de armazenagem automática(AS/RS- Automatic Storage/ Retrieval System)
–Esteiras.
–Pontes rolantes.
–Outros robôs.
–etc.

•A) Estação de posicionamento sobre o transportador para carga/descarga.
•B) Eixo transversal para aumentar o espaço de trabalho do robô.
•C) Estação de inspeção por computador integrada ao robô.
•D) Estação de montagem.

Empacotamento em paletas (pallets):

Transporte de materiais:

Soldagem:



Estrutura do Robô Manipulador:
•Robô Manipulador: Conjunto de corpos rígidos,(chamados elos), interligados em uma cadeia cinemática aberta através de juntas, as quais são acionadas por atuadores de modo a posicionar a extremidade livre da cadeia (órgão terminal, efetuador, garra ou ferramenta) em relação à outra extremidade, que é fixa (base do manipulador).


•Junta: Interligação entre dois elos que permite momovimento relativo entre os mesmos numa única dimensão ou Grau de Liberdade.
•Junta Rotacional: Permite a mudança da orientação relativa entre dois elos.
•Junta Prismática: Permite a mudança da posição relativa entre dois elos.
O BRAÇO MANIPULADOR ANTROPOMÓRFICO

PARTES DO ROBÔ MANIPULADOR
•Base (ou torso):Parte do manipulador presa ao chão, onde é fixa a estrutura.
•Braço:
•As três primeiras juntas, ligadas à base.
•Determinam predominantemente a posição do órgão terminal.
•Deve possuir atuadores potentes.
•Punho:
•As três últimas juntas, ligadas ao órgão terminal.
•Determinam predominantemente a orientação do órgão terminal.
•Deve possuir atuadores leves.
•Órgão Terminal:
•Ligado ao punho
•Interage com os objetos no espaço de trabalho realizando a manipulação.
•Pode ser uma garra (com dedos para segurar objetos) ou uma ferramenta específica.
PARTES DO BRAÇO















Comentários
Postar um comentário